When I had a garage I had sketched out this pinky demon animatronic I wanted to make.
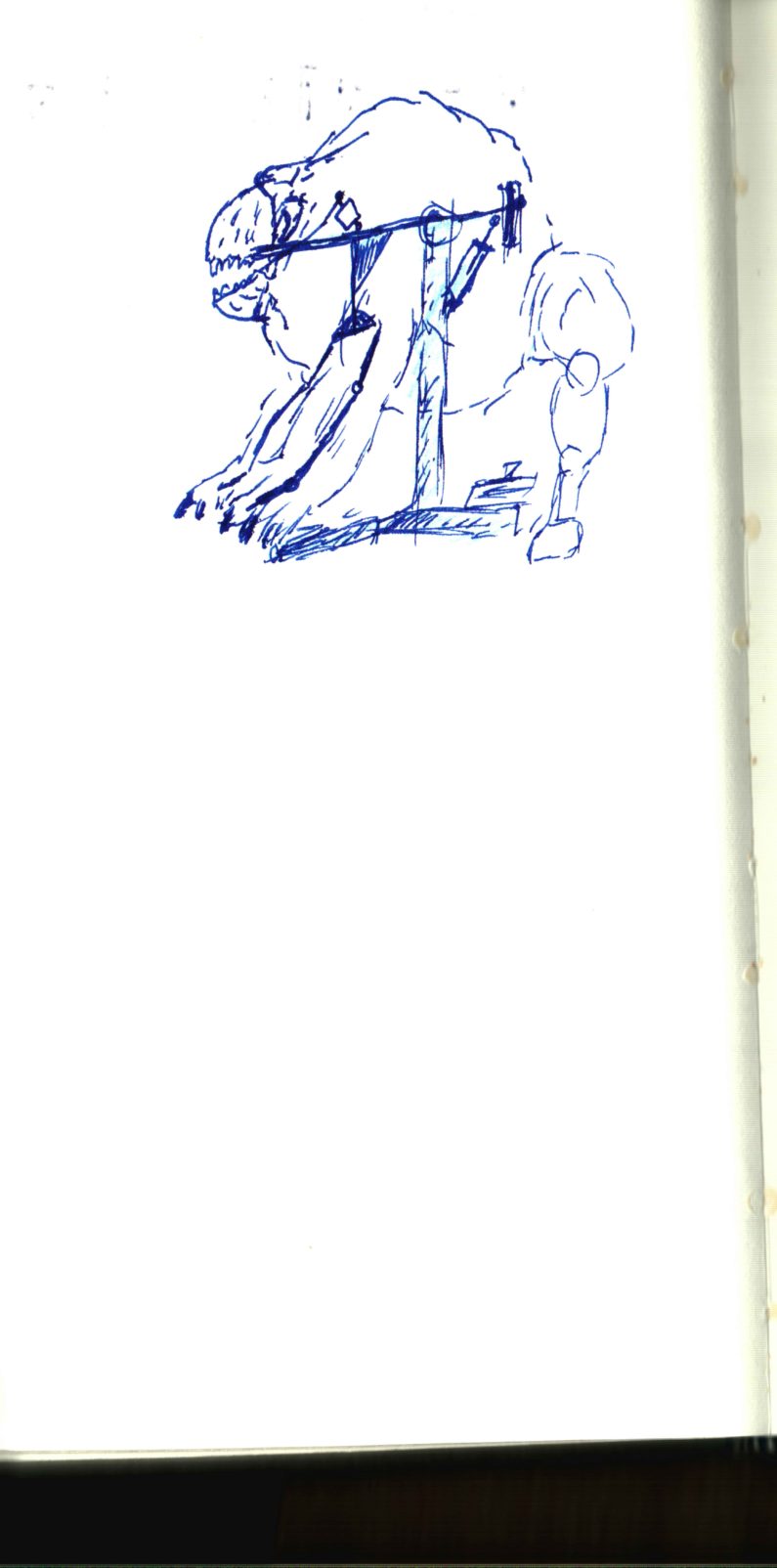
The animatronic armature would be on a base with a post and multi-axis barring at the top that would allow horizontal and vertical motion at a point about waist level.
The rod on pivot would jut forward to a mouth control to open and close the jaw pneumatically.
The idea was to maximize the free animation by attaching a pneumatic cylinder that could move the pivot rod the horizontal and vertical axis while keeping the front and back legs stationary.
This would give the illusion that the arms and legs are the ones providing the movement and if we did the joints on these correctly the motion would be incredibly convincing.
Here are my conceptual sketches for the armature I was going to build. I had learned to weld during this time so all the materials planned to be steel tubing.